空気抵抗の原理と、その応用についての情報をまとめるページです。
空気抵抗の原理
Phunにおける空気抵抗は、物体の前方投射面積×airFrictionMult×物体の移動速度である。
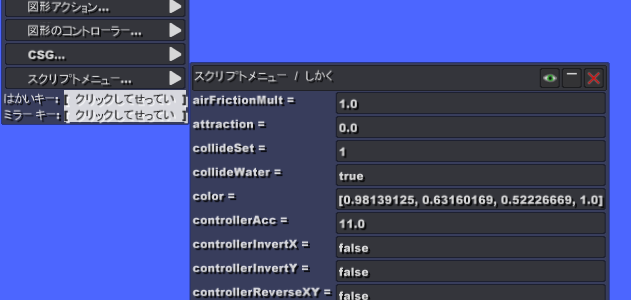
airFrictionMultは物体ごとに設定できる空気抵抗係数である。
物性メニューからは設定できないので、スクリプトメニューで数値入力する。
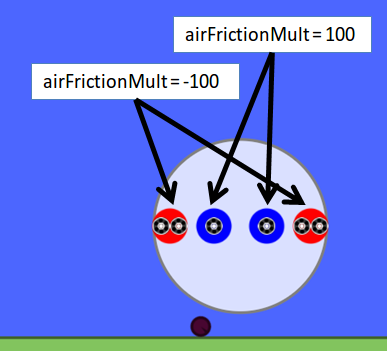
物体の姿勢(前方投射面積)によって空気抵抗が異なることは、以下のようなシーンを作成し、各物体のairFricitionMultを1000程度に設定して落下させることで確認できる。
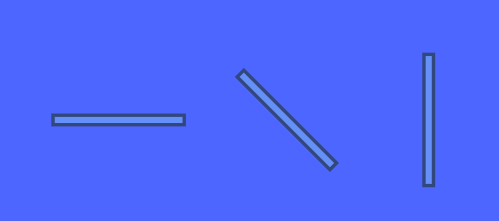
なお本研究会では、一般に空気抵抗が正である物質を青色、負である物質を赤色で表す。
空気抵抗の応用
推進力の取り出し
特殊プロペラ
回転するプロペラの空気抵抗の差によって、推進力を得る。
推力はプロペラのairFrictionMultによって、最高速度は回転数によって決まる。
推力が小さいので、飛行船などに使われる。
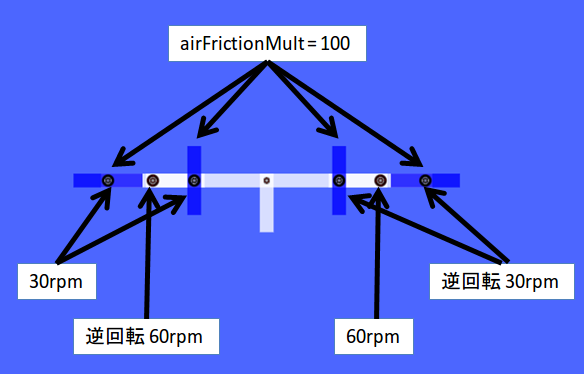
回転するシャフトの先に、半分の回転数のプロペラをつける。
バランスをとるため左右対称に作るのが一般的である。
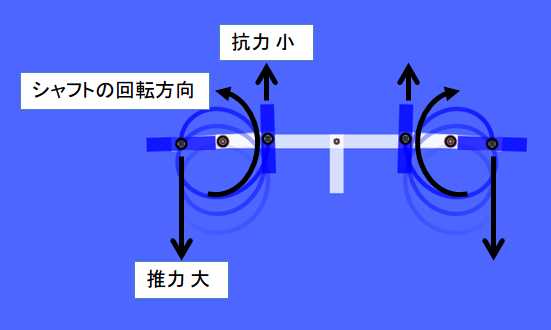
プロペラが前進するときは前方投射面積が小さく、後退するときは大きくなるようにして、空気抵抗の差を推力にする。
モータのトルクは+infにする。
TORISANエンジン
逆回転する2つの円につけたブレードが前後するときの空気抵抗の差によって、推力を得る。
推力はブレードのairFrictionMultによって、最高速度は回転数によって決まる。
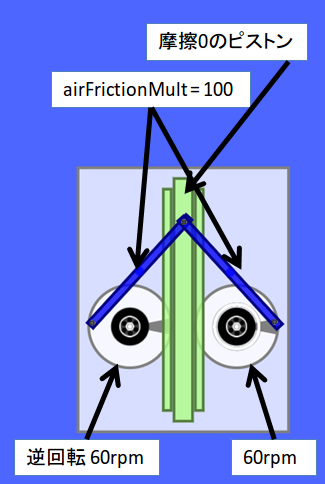
2つの円は逆回転になるように設定する。
2つの円の中心点の垂直二等分線上にブレードの結合点がくるようにするために、ピストンを作る。
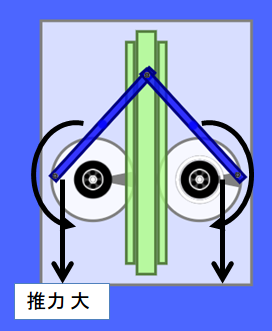
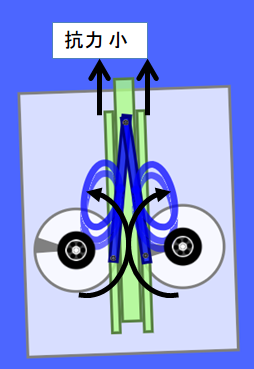
ブレードが後退するときは空気抵抗が大きく、前進するときは小さくなることで、推力を得る。
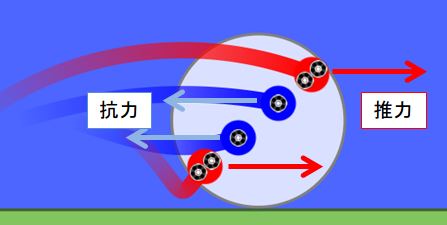
NHI式NAFエンジン
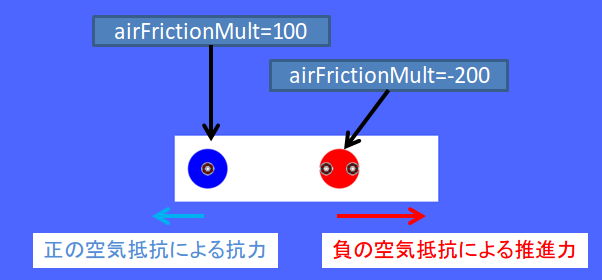
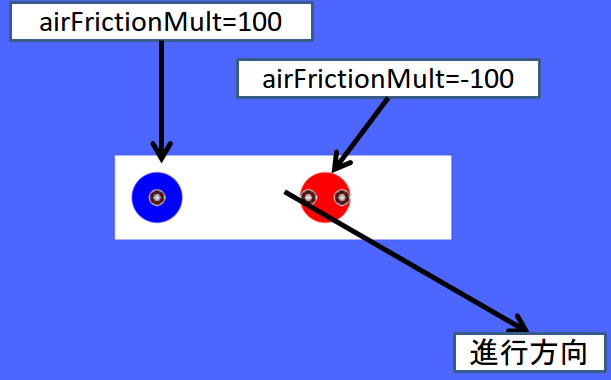
物体の中心付近前方に負の空気抵抗体を、中心から離れた後方に正の空気抵抗体を取り付ける。
負の空気対抗体に設定するairFrictionMultの絶対値を、正の空気対抗体より大きくすると、その差が推進力になる。
速度0の時、負の空気抵抗体は推進力を発生しないので、初期加速を必要とする。
速度が上がるほど加速度も大きくなり、無限に加速する。
正負の空気抵抗体は、本体にヒンジで接続すること。
負の空気抵抗体の固定には、複数のヒンジを用いること。
1つのヒンジで固定すると、負の空気抵抗体の回転が無限に増幅される。
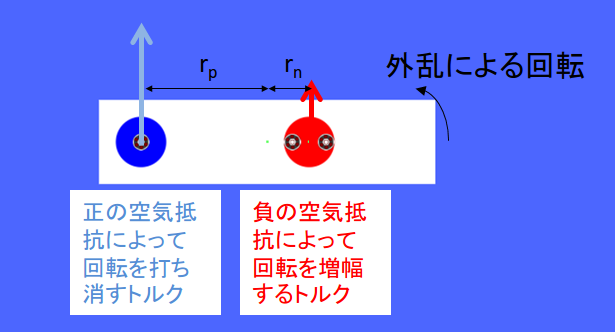
正の空気抵抗体を中心から離して設置することで、回転を打ち消し姿勢を安定させることができる。
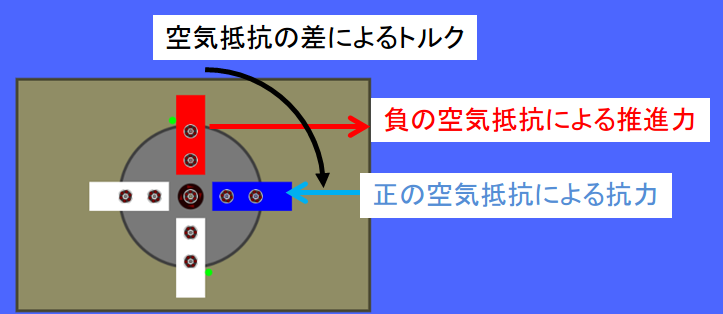
トルクモーター式NAFエンジン
正負の空気抵抗体の前方投射面積の差により推進力を得るエンジン。
初期加速を必要とするが、速度は一定の範囲になる。
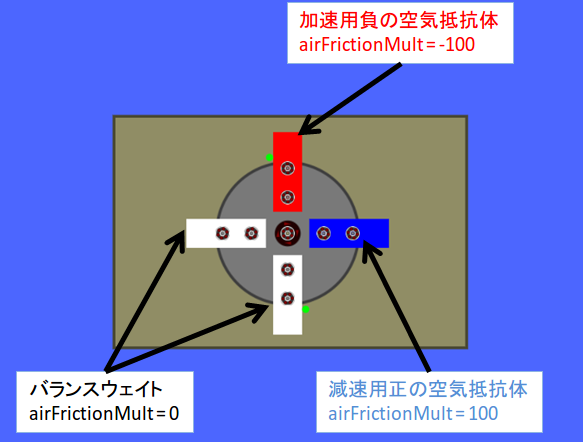
土台となる円に、正負の空気抵抗体、バランスウェイトを固定する。
正負の空気対抗の絶対値は等しくする。
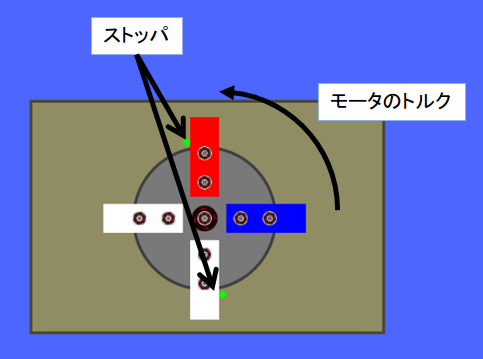
土台となる円(グレー)の中心にモータを設置し、左回りに設定する。
このモータのトルクにより、負の空気抵抗体の前方投射面積は大きく、正の空気抵抗体は小さくなる。
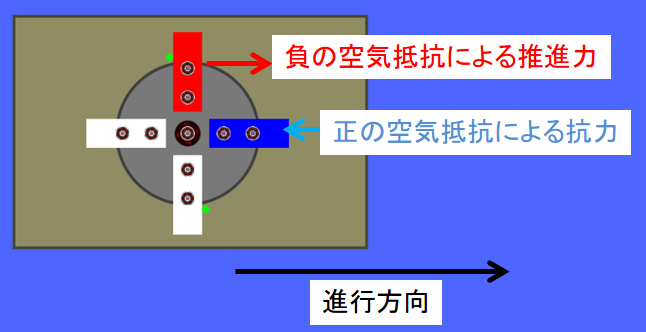
初期速度を与えると、前方投射面積の差により加速する。
速度が大きくなると、正負の空気抵抗がともに大きくなり、右回りのトルクが発生する。
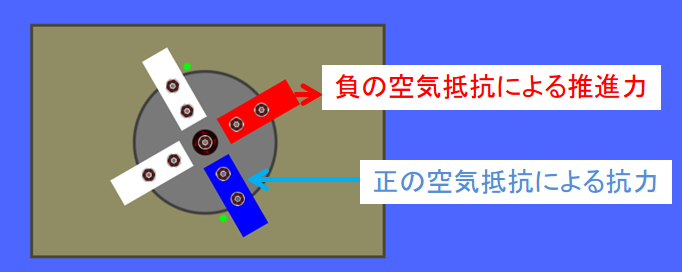
空気抵抗の差による右回りのトルクがモータのトルクを上回ると、機構全体が右へ回転し、正の空気抵抗体の前方投射面積が大きくなるので減速する。
この繰り返しによって、本機構は一定の範囲内で加速と減速を繰り返す。
速度の範囲は、正負の空気抵抗体に設定するairFrictionMultの値と、モータのトルクによって決まる。
TORISAN型NAFエンジン
TORISANエンジンと同様の構造にし、正負の空気抵抗体の前方投射面積の差で加速する。
初期加速を必要とするが、一定の速度に収束する。
安定するため、トルクモーター型よりも飛行機に適する。
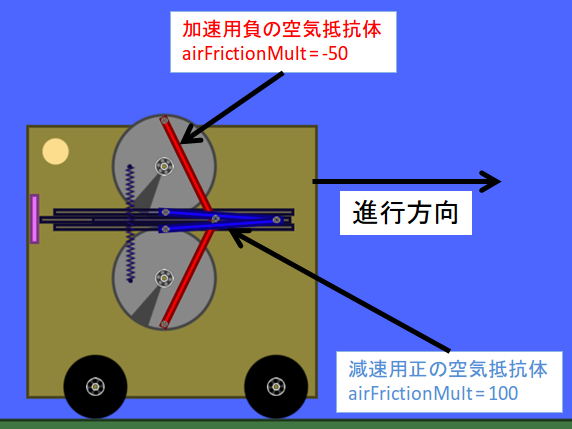
初期状態では負の空気抵抗体の前方投射面積が大きく、正の空気抵抗体が小さくなるようにする。
負の空気抵抗の絶対値は、正の空気抵抗より小さくする。
加減速がなめらかになるように、2つの円を減衰値が大きめのばねでつなぐ。
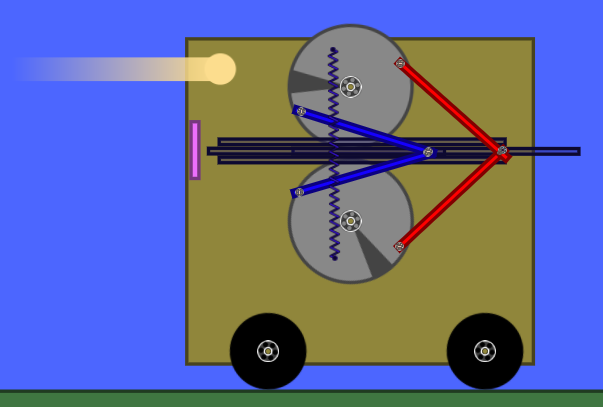
速度が上昇するにつれ、負の空気抵抗体は前に移動し、前方投射面積が小さくなる。
逆に正の空気抵抗体は前方投射面積が大きくなる。
これにより、一定速度での推進が可能になる。
回転力の取り出し
RONAFエンジン
負の空気抵抗体から回転力を得るエンジン。
初期加速を必要とする。
徐々に加速し、一定の回転数に収束する。
円の中心よりに正の空気抵抗体を、周辺よりに負の空気抵抗体をヒンジで取り付ける。
負の空気抵抗体の取り付けには複数のヒンジを用いる。
正負の空気抵抗の絶対値は等しくする。
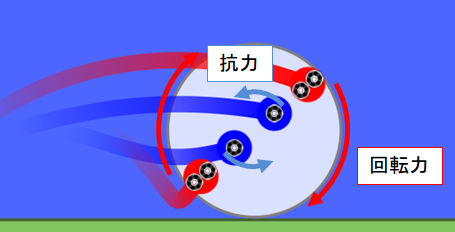
回転については、外周に取り付けられた負の空気抵抗物質が上回るので、回転力が発生する。
並進成分については、正負の空気抵抗が同量発生するので、打ち消される。
結果として回転力だけを取り出すことができる。
姿勢制御
NHI式姿勢安定装置
物体の中心付近前方に負の空気抵抗体を、中心から離れた後方に正の空気抵抗体を取り付ける。
正負の空気対抗体に設定するairFrictionMultの絶対値を等しくする。
正負の空気抵抗体は、本体にヒンジで接続すること。
負の空気抵抗体の固定には、複数のヒンジを用いること。
1つのヒンジで固定すると、負の空気抵抗体の回転が無限に増幅される。
正負の空気抵抗体が発生するトルクによって、姿勢と進行方向が一致する。

資料集
動画データ
シーンデータ
ジェネレータ
研究中の課題
最終更新:2012年05月16日 21:42





















